Da teleoperação à gestão de frotas
Nos estágios iniciais de uma startup de robótica, a relação entre humano e máquina costuma ser íntima e transacional. Um único operador monitora um único robô por vídeo de baixa latência, intervindo manualmente quando o hardware falha. Mas quando as frotas passam de dezenas para centenas de unidades, essa proporção de um para um se torna uma impossibilidade econômica e operacional. A Transitive Robotics, com o lançamento de seu framework open-source 2.0, busca preencher essa lacuna ao deslocar o foco da teleoperação em tempo real para a gestão longitudinal de frotas.
Monitoramento passivo como modelo operacional
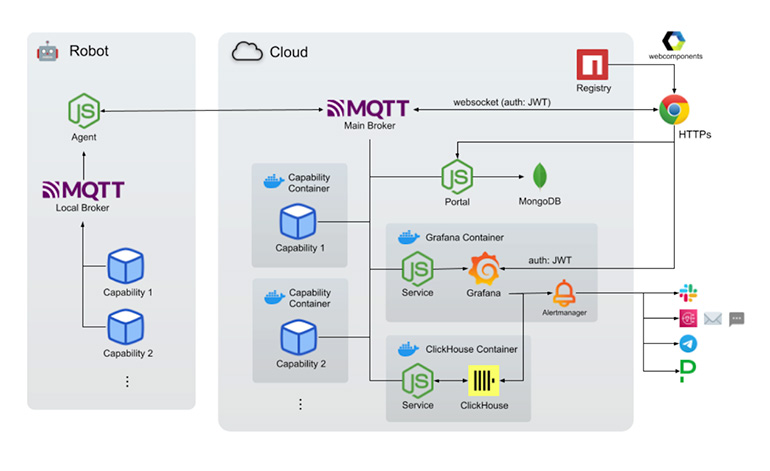
A atualização integra um conjunto de ferramentas de dados de grau industrial — incluindo ClickHouse para armazenamento de séries temporais e Grafana para visualização — projetadas para oferecer uma visão panorâmica da saúde de uma frota ao longo do tempo. Ao incorporar o Alertmanager para notificações personalizadas, o framework permite que empresas abandonem a supervisão ativa e manual em favor de um modelo de monitoramento "passivo". Nessa configuração, operadores só são acionados quando o sistema detecta um desvio da normalidade — uma evolução necessária para empresas que ultrapassam o limiar de 50 robôs.
A infraestrutura como commodity
Em sua base, o Transitive 2.0 se apoia no protocolo open-source MQTTSync e em uma arquitetura de pacotes full-stack para lidar com as complexidades de autenticação e sincronização de dados. Ao transformar em commodity a infraestrutura necessária para operações de frota, o framework reflete um amadurecimento mais amplo do setor: a constatação de que construir um robô é apenas metade da batalha; a outra metade é gerenciar o rastro digital que ele deixa para trás.
Com reportagem de The Robot Report.
Source · The Robot Report