In the early stages of a robotics startup, the relationship between human and machine is often intimate and transactional. A single operator might monitor a single robot via low-latency video, intervening manually when the hardware falters. But as fleets expand from dozens to hundreds, this one-to-one ratio becomes an economic and operational impossibility. Transitive Robotics, with the release of its 2.0 open-source framework, aims to bridge this gap by shifting the focus from real-time teleoperation to longitudinal fleet management.
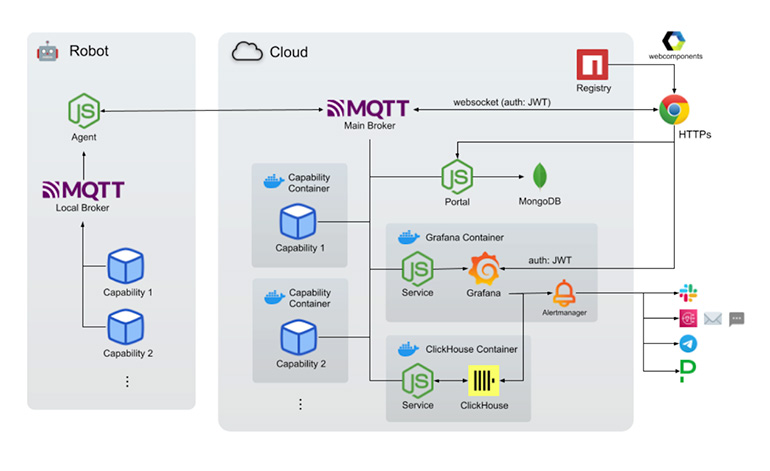
The update integrates a suite of industrial-grade data tools — including ClickHouse for time-series storage and Grafana for visualization — designed to provide a high-level view of a fleet's health over time. By incorporating Alertmanager for custom notifications, the framework allows companies to move away from active, manual oversight toward a "passive" monitoring model. In this setup, operators are only summoned when the system detects a deviation from the norm, a necessary evolution for companies scaling beyond the 50-robot threshold.
From Teleoperation to Telemetry
The shift Transitive 2.0 encodes is not merely technical; it reflects a structural inflection point in how robotics companies grow. In the prototype and pilot phases, teleoperation — direct human control of a remote machine — serves as both a safety net and a data-gathering mechanism. Engineers watch video feeds, correct navigation errors in real time, and use each intervention as a training signal. The model works when the fleet is small and the cost of constant human attention can be absorbed into research budgets.
But teleoperation does not scale linearly. Each additional robot demands incremental human bandwidth, and the economics deteriorate quickly. A fleet of ten machines might require two or three operators on a shift; a fleet of two hundred would, under the same model, require staffing levels that erode whatever labor-cost advantage the robots were meant to deliver in the first place. The industry has seen this tension play out across sectors — warehouse logistics, last-mile delivery, agricultural automation — wherever companies have attempted to move from controlled pilots to commercial deployment.
Transitive 2.0's architecture addresses this by treating fleet data as a first-class product. Time-series databases like ClickHouse are designed to ingest and query massive volumes of timestamped records efficiently, the kind of telemetry streams that hundreds of robots generate continuously: battery levels, motor temperatures, navigation waypoints, error codes. Grafana, widely adopted in DevOps and infrastructure monitoring, provides dashboards that translate raw data into legible operational views. The combination is borrowed directly from the playbook of cloud infrastructure management, where similar tools have long been used to monitor thousands of servers with minimal human oversight.
The Infrastructure Layer as Competitive Bottleneck
At its core, Transitive 2.0 relies on an open-source MQTTSync protocol and a full-stack package architecture to handle the complexities of authentication and data synchronization. MQTT, a lightweight messaging protocol originally developed for low-bandwidth IoT environments, has become a de facto standard for robot-to-cloud communication. Transitive's contribution is to layer synchronization and security on top of it, packaged in a way that robotics teams can deploy without building bespoke infrastructure from scratch.
By commoditizing this infrastructure, the framework reflects a broader maturation in the industry: the realization that building a robot is only half the battle; the other half is managing the digital exhaust it leaves behind. Many robotics startups have historically treated fleet software as an afterthought, allocating engineering resources overwhelmingly toward perception, manipulation, and autonomy. The result is a recurring pattern — companies that build capable machines but struggle to operate them reliably at scale, because the monitoring, alerting, and data-pipeline layers were improvised rather than architected.
This pattern mirrors what happened in cloud computing a decade earlier. Before standardized observability tools emerged, every software company built its own logging and monitoring stack, often poorly. The arrival of open-source frameworks like Prometheus and Grafana did not eliminate the need for operational expertise, but it raised the floor — making competent monitoring accessible to teams that could not afford to build it themselves.
Whether Transitive 2.0 plays a comparable role in robotics depends on adoption, and adoption depends on whether the framework proves flexible enough to accommodate the wide variety of robot form factors, communication environments, and operational contexts that the industry encompasses. The tension between standardization and customization is familiar in platform economics: too rigid, and the tool cannot serve diverse use cases; too flexible, and it offers little advantage over building from scratch. Where Transitive lands on that spectrum will determine whether it becomes foundational infrastructure or a useful but niche utility.
With reporting from The Robot Report.
Source · The Robot Report