The construction industry remains a structural outlier in the global economy, characterized by its immense scale and persistent resistance to technological integration. According to reporting from The Next Web, London-founded startup All3 has secured $25 million in seed funding to develop an end-to-end automated construction platform. The company proposes to bridge the gap between architectural briefing and finished housing through a combination of proprietary AI design software and a specialized on-site robot, dubbed the Mantis.
This capital injection arrives at a moment when the sector faces acute pressure from rising labor costs, material shortages, and a chronic housing supply deficit in major urban markets. By targeting the entire value chain rather than isolated tasks, All3 is positioning itself against a deeply entrenched ecosystem of fragmented subcontractors, manual workflows, and iterative design cycles. The fundamental question is whether a vertical integration strategy, supported by legged robotics, can overcome the physical and regulatory complexities that have historically stymied construction innovation.
The Anatomy of Construction Stagnation
The construction sector is frequently cited as one of the least digitized industries globally, a status that is not merely a result of cultural conservatism but a reflection of the inherent variability of on-site work. Unlike manufacturing, where environments are controlled and processes are highly repeatable, construction projects are site-specific, subject to weather fluctuations, and dependent on a rotating cast of specialized trades. This fragmentation creates a 'hand-off' problem, where errors in the design phase propagate through the supply chain, leading to significant rework and cost overruns.
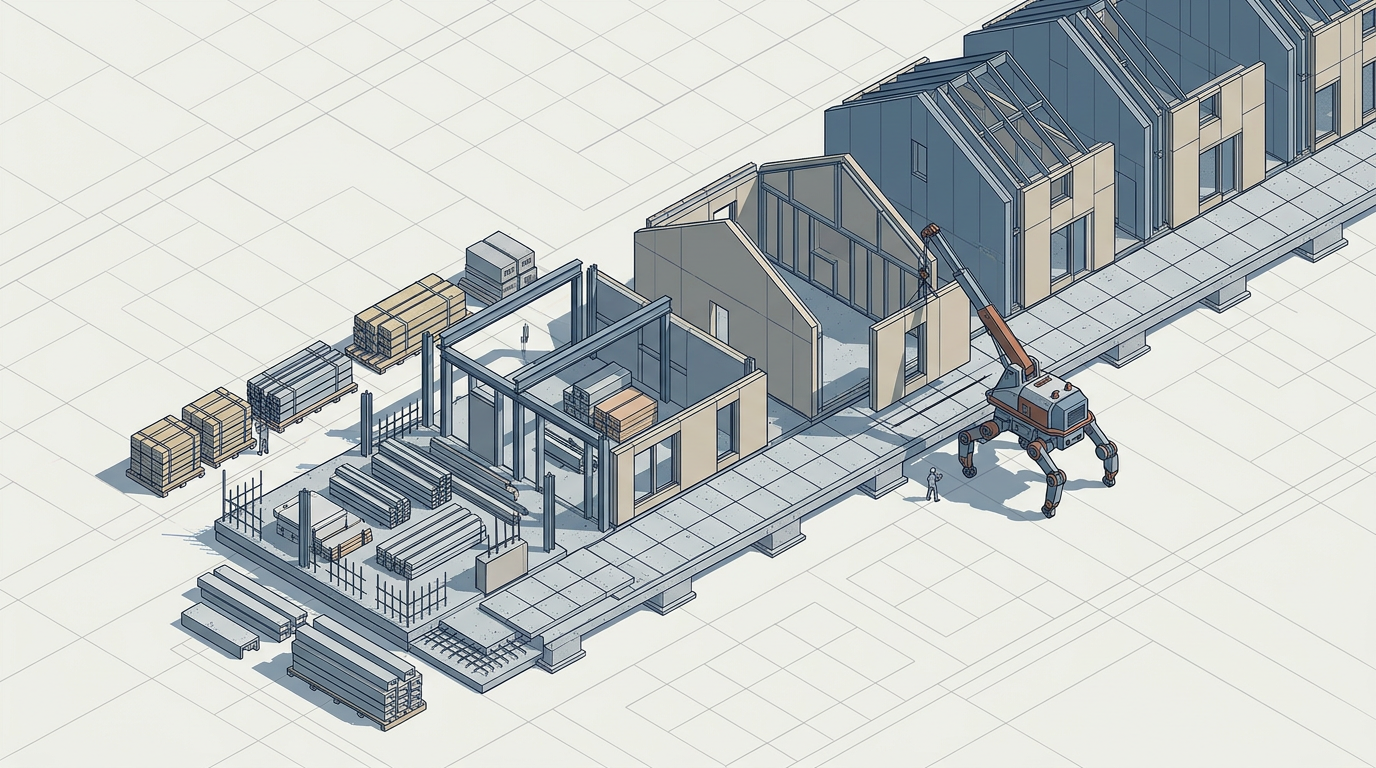
Historical attempts to automate this space have often focused on modular or off-site manufacturing, where components are built in factories and assembled on-site. While this approach has seen success in specific niches, it often struggles to scale due to logistics costs and architectural limitations. All3’s approach, which integrates software-driven design with on-site robotics, attempts to bridge the gap between the predictability of factory-based systems and the flexibility required for varied building sites. By controlling the digital thread from the architect’s initial vision to the final deployment of the Mantis robot, the startup aims to minimize the information loss that typically plagues traditional projects.
However, the structural challenges remain formidable. The industry is governed by a complex web of building codes, safety regulations, and labor union agreements that have evolved to accommodate human-centric workflows. Introducing autonomous systems into these environments requires not only technological maturity but also a fundamental shift in how risk and liability are distributed among stakeholders. The transition from human-led manual labor to AI-orchestrated robotic deployment necessitates a level of standardization that the construction industry has historically struggled to achieve.
The Mechanism of Integrated Automation
The core of All3’s value proposition lies in its attempt to unify the digital and physical domains of construction. By using AI to generate design parameters that are inherently compatible with robotic execution, the firm seeks to eliminate the 'translation' errors that occur when architectural blueprints are converted into field instructions. If the design software is 'aware' of the robot's physical capabilities and constraints, the resulting plans could theoretically be executed with higher precision and lower material waste than traditional methods.
Legged robots like the Mantis are particularly significant in this context because they are designed to navigate the uneven terrain of an active construction site, a feat that wheeled robots have struggled to master. By automating repetitive or hazardous tasks—such as material handling, wall layout, or site inspection—the robot acts as a force multiplier for the remaining human workforce. This is not necessarily about the total replacement of labor, but rather the optimization of human effort toward higher-value tasks, such as complex system integration and quality assurance, which require cognitive flexibility that current AI models cannot yet replicate.
This mechanism of 'co-botics'—where humans and machines operate in tandem—represents the most viable path toward sector-wide adoption. The economic incentive is clear: if the cost of labor and the duration of the construction cycle can be compressed through automation, the impact on internal rates of return for developers would be substantial. Yet, the challenge lies in the 'edge cases'—the unexpected site conditions or design deviations that occur in every project. A robot that is highly efficient in a steady state may struggle to adapt to the chaotic reality of a real-world construction site without significant human intervention.
Implications for the Broader Stakeholder Ecosystem
For regulators and urban planners, the emergence of companies like All3 presents a new set of challenges regarding safety standards and building compliance. Existing codes are written with human workers in mind; they do not account for the presence of autonomous machinery on active sites or the digital integrity of AI-generated structural plans. Regulators will eventually be forced to update building codes to facilitate the use of robotics, a process that is notoriously slow and often lags behind technological advancements. This regulatory friction could become the primary bottleneck for scaling, even if the underlying technology proves its efficacy.
For competitors, the All3 model serves as a signal that the 'full-stack' approach is becoming the standard for venture-backed construction startups. Traditional firms that rely on manual labor and legacy software will likely find themselves at a disadvantage in terms of cost and speed, forcing a wave of consolidation or digital transformation within the industry. Consumers, meanwhile, stand to benefit from potentially lower housing costs and faster project delivery times, provided that the quality of the built environment remains consistent. The tension here is between the drive for efficiency and the need for durable, high-quality housing that meets local aesthetic and functional expectations.
The Outlook for Robotic Construction
What remains uncertain is the scalability of this technology across diverse geographies and building types. A system that works well for low-rise residential structures may not be easily adapted to high-density urban infrastructure or industrial projects. Furthermore, the reliance on proprietary software and hardware creates a 'walled garden' effect, which could limit interoperability with existing industry standards. Investors will be watching closely to see if All3 can move beyond pilot projects and demonstrate consistent performance in varied, non-ideal environments.
As the industry continues to grapple with these technological shifts, the question remains whether the construction sector will follow the path of manufacturing, which underwent a similar transformation decades ago, or if the unique constraints of the built environment will necessitate an entirely new paradigm of automation. The integration of AI and robotics is clearly gaining momentum, but the transition from a manual-centric model to an automated one will be measured in decades, not years. The success of these early efforts will ultimately depend on their ability to integrate seamlessly into the existing, messy reality of the construction site.
As the intersection of robotics and architecture continues to evolve, the question of whether these tools will truly democratize construction or merely consolidate power among a few high-tech providers remains open for debate. The industry is currently in a phase of experimentation where the promise of efficiency is being tested against the reality of physical constraints, and the next few years will likely determine the viability of this platform-based approach.
With reporting from The Next Web
Source · The Next Web